Распечатал на принтере вторую крышку, в которой располагается отсек с аккумуляторами. Пришли коннекторы под аккумуляторы, т.е. сейчас можно сделать прибор с любым количеством аккумуляторов внутри.
На самом деле, если поставить все 8 батарей, то вес базы становится солидным, карман будет оттягивать)

При проектировании корпуса, не учел крепления корпусов между собой. Поэтому впаял туда просто болты. Некрасиво, но это первый тестовый корпус, его однозначно под модификацию.
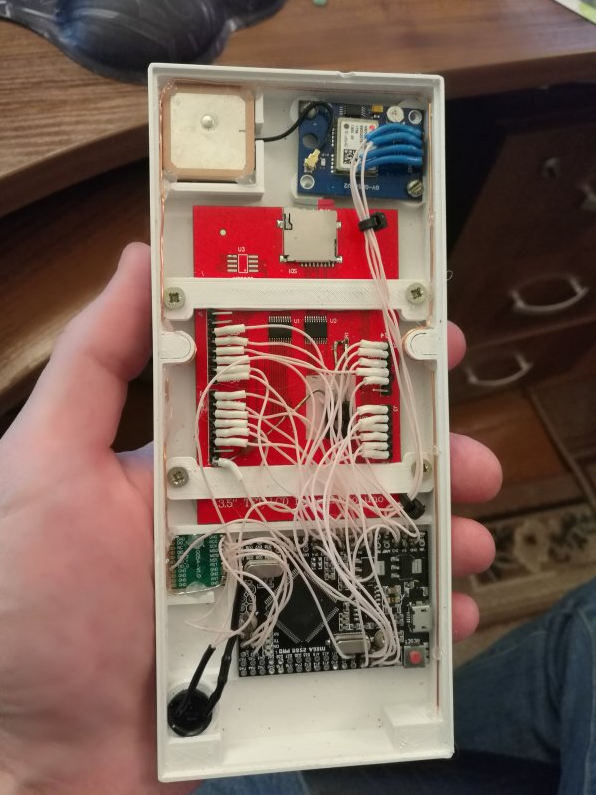
В оставшееся пространство внизу вошла плата BMS с балансировкой и кнопка, для запуска этой платы. С этими BMS платами опять всю голову сломал! Как я понял, основное их предназначение это электроприборы, в которых аккумулятор устанавливается стационарно. Я имею ввиду, что аккумулятор всегда соединен с BMS платой и они никогда не отключаются.
В нашем случае есть возможность замены аккумуляторов. В этом случае, если вынуть все батареи и установить заново, плата BMS уйдет в защиту, и работать не будет. Чтобы ее запустить, надо к BMS подключить зарядное устройство (так сделано на шуруповертах например, если он остановился из-за перегрузки). У нас зарядного нет, и для запуска платы пришлось вкорячить в корпус доп кнопку.
Мне такая реализация не нравится, все под замену, но на время тестирования сделал так, потому что переделывать надо еще много всего.

Внизу кнопка включения. Тоже плохой вариант, тумблер можно задеть и случайно базу выключить. Кнопку включения надо делать скрытую.

Это крышка, которая закрывает отсек с аккумуляторами. Тоже под замену. По краям надо сделать бортики, чтобы крышка обеспечивала хоть какую герметичность

Получилось как то так

Калькулятор довольно толстый…
В информационное меню добавил информацию о количестве спутников сигнал с которых получает GPS.
Чем больше спутников, тем точнее положение.
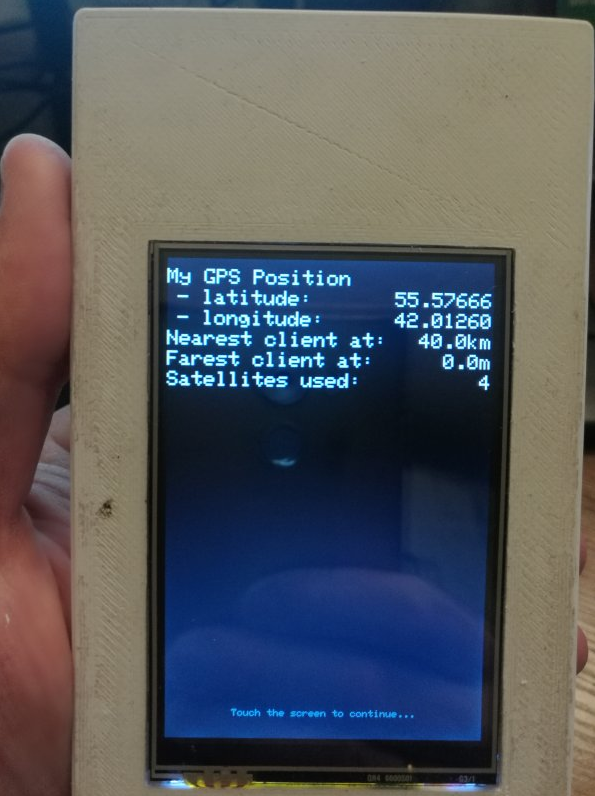
В основном меню, если GPS потерял все спутники, картинка меню будет с красным крестиком.
Это значит что сейчас база не распознает свое местоположение, и установку жерлиц лучше прекратить до появления сигнала.

Немного тороплюсь, в выходные поеду на испытания по налиму, хочу взять десяток жерлиц.
В общем, что хорошо, что плохо:
Хорошо:
– разобрался с 3D принтером, печать стала стабильной. Привык к программе отрисовки 3D моделей, изменения делаются достаточно быстро сейчас
– корпус жесткий, хороший. Все элементы надежно закреплены и не болтаются, можно переходить к полноценному тестированию (хотя щука сейчас в анабиозе, попробую налима)
Плохо:
– питание реализовано ужасно, эти BSM платы никуда не годятся. Сейчас Arduino питается от напряжения 8.2 вольт. Это две сборки последовательно по 4 аккумулятора параллельно, подключенных к BMS.
Так вот, потребление от такой системы составляет примерно 250 милиампер, 8.2 * 0.25 = 2.05 ватта. А если питать от 5 вольт, то потребление будет 350 милиампер, 5 * 0.35 = 1.75 ватта. Т.е. это гораздо выгоднее питать систему от 5ти вольт чем от 8.2. Поэтому, в конечной реализации я поставлю DC-DC Step Up конвертор, который из аккумуляторов 18650 будет делать 5 вольт и питать систему, никаких сложных BMS с кнопочным стартом.
– корпус надо обработать ацетоновой паровой баней, чтобы сгладить слои от 3D принтера, а так же можно покрасить, будет смотреться эстетичнее
– в корпусе не предусмотрены мелочи, такие как кнопка включения, отверстия крепления крышек. Все это надо продумать и реализовать
– пришел модуль для компаса, поигрался с ним. Дело в том, что корректно направление он показывает, только если держать корпус строго горизонтально. Любой наклон корпуса приводит к ошибкам показаний. Вот думаю, стоит ли его вообще ставить.